Odkryj czujniki SPIKE™ Prime
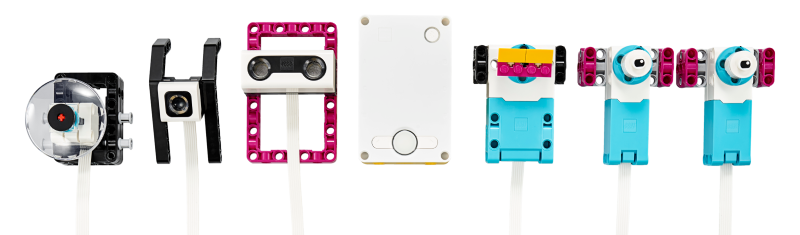
Czujniki dostarczają robotom informacje z otoczenia. Sensory w zestawiem podstawowym SPIKE™ Prime potrafią reagować na dotyk, zbliżanie się jakiś obiektów, pozwalają śledzić linię, określać położenie robota i wiele innych.

Czujnik siły (dotyku)
Czujnik siły pozwala Twojemu robotowi wykryć dotyk i określić jego siłę. Mierzy ją w niutonach lub procentach (100% odpowiada 10 niutonom).
Kluczowe cechy:
- Częstotliwość próbkowania czujnika: 100Hz
- Strefa aktywacji czujnika dotykowego: 0 do 2 mm
- Strefa aktywacji wykrywania siły: 2 do 8 mm
- Aktywacja siłą: 2,5 do 10 niutonów
- Rozdzielczość 0,1 niutona
- Dokładność +/1 0,65 niutona
Propozycje projektów:
- Utwórz grę „cookie clicker”, która wyświetla liczbę naciśnięć czujnika siły.
- Zbuduj pułapkę, która zamyka się, gdy coś jej dotknie.
- Za pomocą jednego lub dwóch czujników siły stwórz prosty pilot do samochodu robota. Ustaw prędkość silnika proporcjonalną do wielkości siły.
- Spraw, aby robot rozpoczął swoje zaprogramowane działanie po naciśnięciu czujnika siły. Jest to szczególnie przydatne, gdy na przykład trudno jest dotrzeć do przycisków na hubie.
Czujnik koloru (światła)
Czujnik koloru rozpoznaje: kolor, światło odbite i światło otoczenia. Może być również używany jako źródło światła.
- Kolor — w tym trybie czujnik koloru może rozróżniać osiem różnych kolorów LEGO. Każdy kolor jest również reprezentowany przez wartość (patrz „Tabela danych kolorów i światła” poniżej). Czujnik może również osobno wysyłać nieprzetworzone wartości koloru czerwonego, zielonego i niebieskiego (RGB).
- Natężenie odbitego światła — w tym trybie czujnik koloru emituje światło i mierzy ilość odbitego światła od testowanej powierzchni. Intensywność światła jest mierzona w procentach od 0 do 100, gdzie 0 oznacza bardzo ciemne, a 100 bardzo jasne.
- Intensywność światła otoczenia (tylko w pythonie) — w tym trybie czujnik koloru mierzy ilość światła w swoim otoczeniu, nie wytwarzając własnego źródła światła. Intensywność światła otoczenia jest mierzona w procentach od 0 do 100, gdzie 0 oznacza bardzo ciemne, a 100 bardzo jasne.
Kluczowe cechy:
- Częstotliwość próbkowania czujnika: 100Hz
- Optymalna odległość odczytu: 16 mm (w zależności od wielkości obiektu, jego koloru i rodzaju powierzchni)
- Trzy indywidualnie sterowane diody LED (tylko w pythonie)
Tabela kolorów i światła:
|
Tryb |
Zakres wyjściowy |
|
Kolor |
-1 = Brak koloru 0 = Czarny (LEGO:26; R:0, G:0, B:0) 1 = Magenta (LEGO:124; R:144, G:31, B:118) 3 = Niebieski (LEGO:23; R:30, G:90, B:168) 4 = Turkusowy (LEGO:322; R:104, G:195, B226) 5 = Zielony (LEGO:28; R:0, G:133, B:43) 7 = Żółty (LEGO:24; R:250, G:200, B:10) 9 = Czerwony (LEGO:21; R:180, G:0, B:0) 10 = Biały (LEGO:01; R:244, G:244, B:244) |
|
Światło odbite |
0% = brak odbicia, 100% = bardzo jasne odbicie |
|
Światło otoczenia (tylko w Pythonie) |
0% = ciemny, 100% = jasny |
Propozycje projektów:
- Podziel klocki LEGO według ich koloru.
- Jedź po różnokolorowych kawałkach papieru, odpowiadając na każdy kolor inną akcją.
- Stwórz instrument muzyczny, który odtwarza różne nuty w zależności od wykrytego koloru
- Utwórz czytnik kodów kreskowych.
- Zaprogramuj robota, który zatrzyma się, gdy dotrze do krawędzi stołu (tj. nie wykryje odbitego światła).
- Stwórz robota podążającego za linią.
Czujnik odległości
Czujnik odległości mierzy odległość od obiektu lub powierzchni za pomocą ultradźwięków. Wysyła fale dźwiękowe o wysokiej częstotliwości, które odbijają się od dowolnego obiektu w zasięgu, i mierzy, ile czasu zajmuje powrót dźwięku do czujnika. Czujnik odległości może być również używany jako źródło światła, z czterema segmentami LED wokół „oczu”, którymi można sterować indywidualnie.
Dodatkowo tylną część czujnika można zdjąć, a kabel odłączyć, dzięki czemu staje się on kablem typu breakout LEGO Power Functions 2.0 (LPF2). Daje to dodatkowe możliwości konstrukcyjne i programistyczne zaawansowanym użytkownikom.
Kluczowe cechy:
- Czujnik odległości od 50 do 2000 mm
- Szybkie wykrywanie odległości od 50 do 300 mm
- Białe światło emitowane wokół „oczu” czujnika podzielone na cztery segmenty – dwa górne i dwa niższe segmenty
Propozycje projektów:
- Zaprogramuj robota, aby poruszał się po pokoju, unikając obiektów na swojej drodze.
- Podjedź do obiektu lub ściany, zwalniając w miarę zbliżania się.
- Stwórz rzeźbę kinetyczną (rzeźbę z ruchomymi częściami), która porusza się, gdy ktoś się do niej zbliży.
Żyroskop/akcelerometr (czujnik położenia i obrotu)
Oprócz opisanych powyżej czujników zewnętrznych, hub SPIKE Prime ma wbudowane czujniki - trójosiowy akcelerometr i trójosiowy żyroskop.
Ta kombinacja akcelerometru i żyroskopu pozwala określić orientację huba (tj. przód, tył, góra, dół, prawa strona, lewa strona) oraz zdarzenia z nim związane (tj. stuknięcie, swobodny upadek i potrząśnięcie).
Hub może określić swój obrót wokół dowolnej z trzech osi za pomocą czujnika żyroskopowego. Pomiary to poziom, obrów i odchylenie. Dla każdej osi czujnik żyroskopowy mierzy szybkość obrotu w stopniach na sekundę i śledzi całkowity kąt obrotu w stopniach.
Propozycje projektów:
- Zaprogramuj robota tak, aby obracał sięo określony kąt.
- Zaprogramuj robota, aby wykrywał, czy się przewrócił.
- Pokaż, jak bardzo obrócił się twój robot.
- Stwórz samobalansującego robota.
Silniki (czujnik obrotu)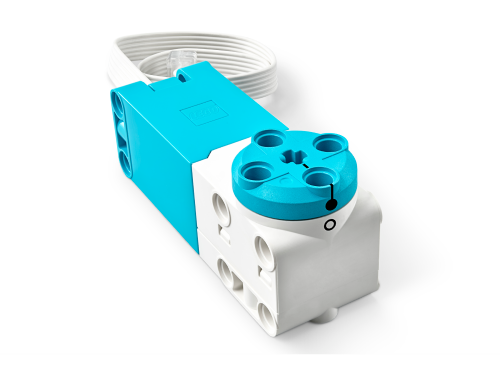
Silniki SPIKE Prime są wyposażone w wewnętrzne czujniki obrotu i mogą mierzyć prędkość silnika i jego położenie. Każdy silnik może być używany jako sensor zgłaszając swoją pozycję podczas ręcznego obracania.
Silniki mogą mierzyć swoją pozycję w stopniach jako pozycję bezwzględną w odniesieniu do punktu zerowego zaznaczonego na silniku lub w odniesieniu do innego wybranego punktu zerowego.
Kluczowe cechy:
- 360 zliczeń na obrót
- Dokładność: ≤ +/- 3 stopnie
- Częstotliwość aktualizacji: 100 Hz
Propozycje projektów:
- Utwórz zamek szyfrowy.
- Przyłącz koło do silnika i użyj czujnika do zmierzenia przebytej odległości.
- Wymyśl instrument muzyczny, który wykorzystuje silniki do kontrolowania wysokości, czasu trwania i/lub głośności nut.
Jak Wy wykorzystujecie czujniki w Waszych projektach? Jak wykorzystujecie dane wyjściowe? Podzielcie się pomysłami i inspiracjami :)
Na podstawie materiałów LEGO Education




Komentarze